Thank You! The stepper configuration was actually a bit easier than I thought. Where I am bouncing off the wall is dealing with the camera, between PiCamera and OpenCV, I keep having “Brain Farts”. Originally, I was 100% on Alexamder/RPITelecine and with a small modification, the direct via “Easy Driver Board” I was able to accomplish what I wanted. The problem I ran into with that, being “Dumb”, was poor machine design and the lack of “Male” following directions with the whole command line thing. So my second attempt failed with zero results, trying to figure out how to simplify the original that I was following. So now on to my third attempt, and I have what seems like a good mechanical base that I can now print / manufacture modifications as need be, and your project is what started a path upon which my GUI was partially based on (at least going by the original screen shot that I posted). While my GUI has evolved somewhat, the integration of it into the RPiTelecine, I believe is the wrong direction that I have been traveling. So I think that I am starting (at least partially) over where I am going to try to integrate what I like and need from the RPiTelecine project into mine.
All that being said, I keep coming up short on what the HQ camera capabilities actually are, versus the PiCamera Library. While I don’t necessarily have a problem switching to C++ LibCamera for my project (even though it is not ready for the HQ Camera), I would just assume, go with Python since I am this deep already. Where can I find the information on what parameters the HQ Camera can accept? I first started my GUI on what the PiCamera offered, AWB Modes Exposure Modes etcetera, soon realizing that many of these mean nothing for what we are trying to accomplish. So, do I just give the option of Auto or Off for AWB and Exposure modes, or option them all? A whole another topic, is the difference between Exposure and Shutter Speed, in relation to the Camera Libraries?
I see that you have already tried a lot of things! It seems to me that the RPITelecine project is quite old, the control of the camera seems to me not very elaborate whereas it is a delicate part.
As far as PiCamera and HQ are concerned, all the possible parameters are in the documentation which is very well done. It is the best documentation you can find about the camera and the GPU, it should be read and re-read carefully. There is no difference of parameters between the HQ and the previous models except the mode and the resolution at the opening
On the other hand PiCamera will not be available anymore in the medium term
For the parameters at least:
-
At opening: mode, resolution, hflip, vflip
-
awb is possible but not recommended, it is better to work with fixed and customizable red and blue gains
-
shutter_speed is what you request and exposure_speed is what you get. shutter_speed = 0 requires auto exposure (with exposure_mode on)
-
exposure_mode
-
fps
Whether to capture in auto or fixed exposure is controversial, both possibilities are useful.
The interactions between these parameters are tricky to understand.
The other parameters iso, compensation, … are less important but can be useful.
There are also choices to make for preview, capture, Hdr or not, storage.
So your interface will get more complicated as you go along!
3 Likes
Hello, your project is incredible, congratulations.
Could you share with me the zip file of the latest version with the screen included?
(Maybe using Drive? eduardospg2903@gmail.com)
Best regards, Eduardo Silvestre.
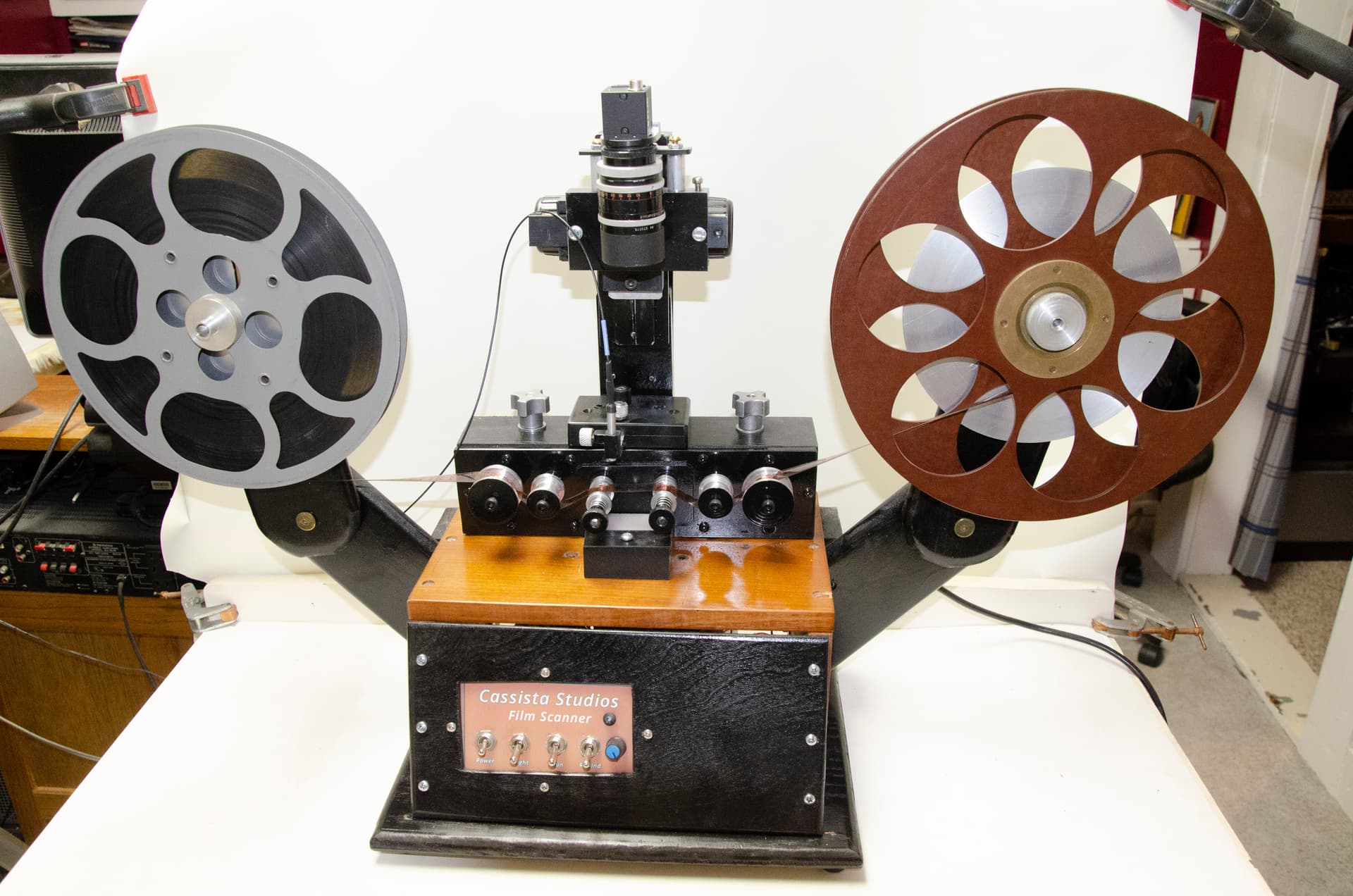
Hello, This looks good, I built a machine almost like this and currently using it to scan 16mm film and I am currently building a more advanced machine to digitize 8mm, super 8mm and 16mm film. It will also digitize super 16mm negative or positive material as well, I am integrating the machine with the DaVinci Studio software and I should have the machine operational in the next month or so.
This is my existing machine. I would love to share ideas and info with you
Al Cassista
4 Likes