Providing an update on the progress (or lack of progress).
I implemented a pure-math pick-up driver, and it works fairly well. The caveat is that the dimensions of the pick-up spool and the film thickness are key variables for the equation.
An alternative been considered, to eliminate the measurement requirements, is a capstan driven stop motion transport.
Here is a first draft, which reuses some of the components in the Snailscan first version above.
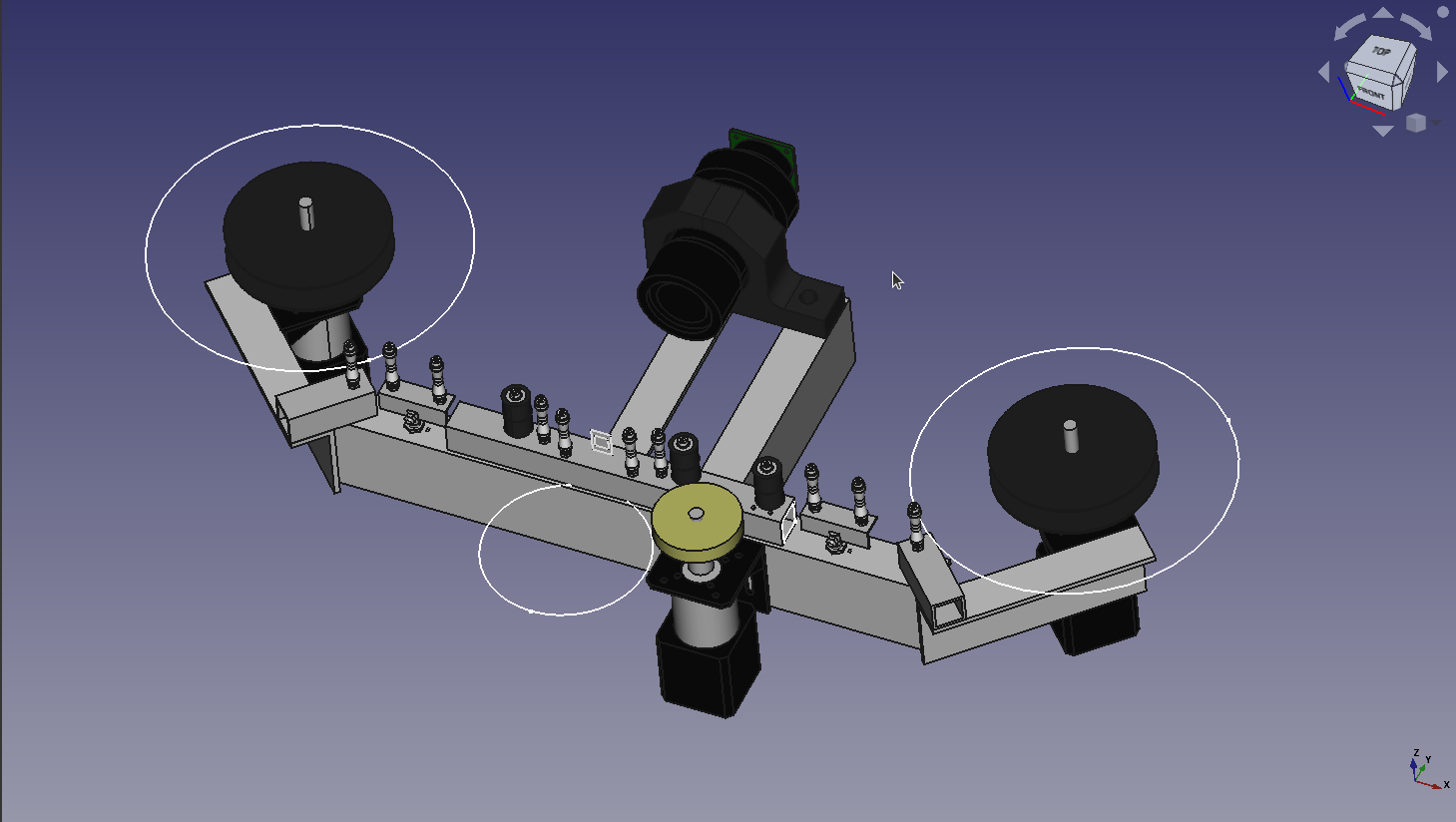
For simplicity, the capstan will be driven by the same type of geared stepper. Two tension sensors will be used to maintain tension before and after the gate-capstan block.