@PM490: well, this is what I call a massive, stable machine! Impressive.
Some comments with respect to your remark “one stepper motor per reel”, as I am using a similar approach:
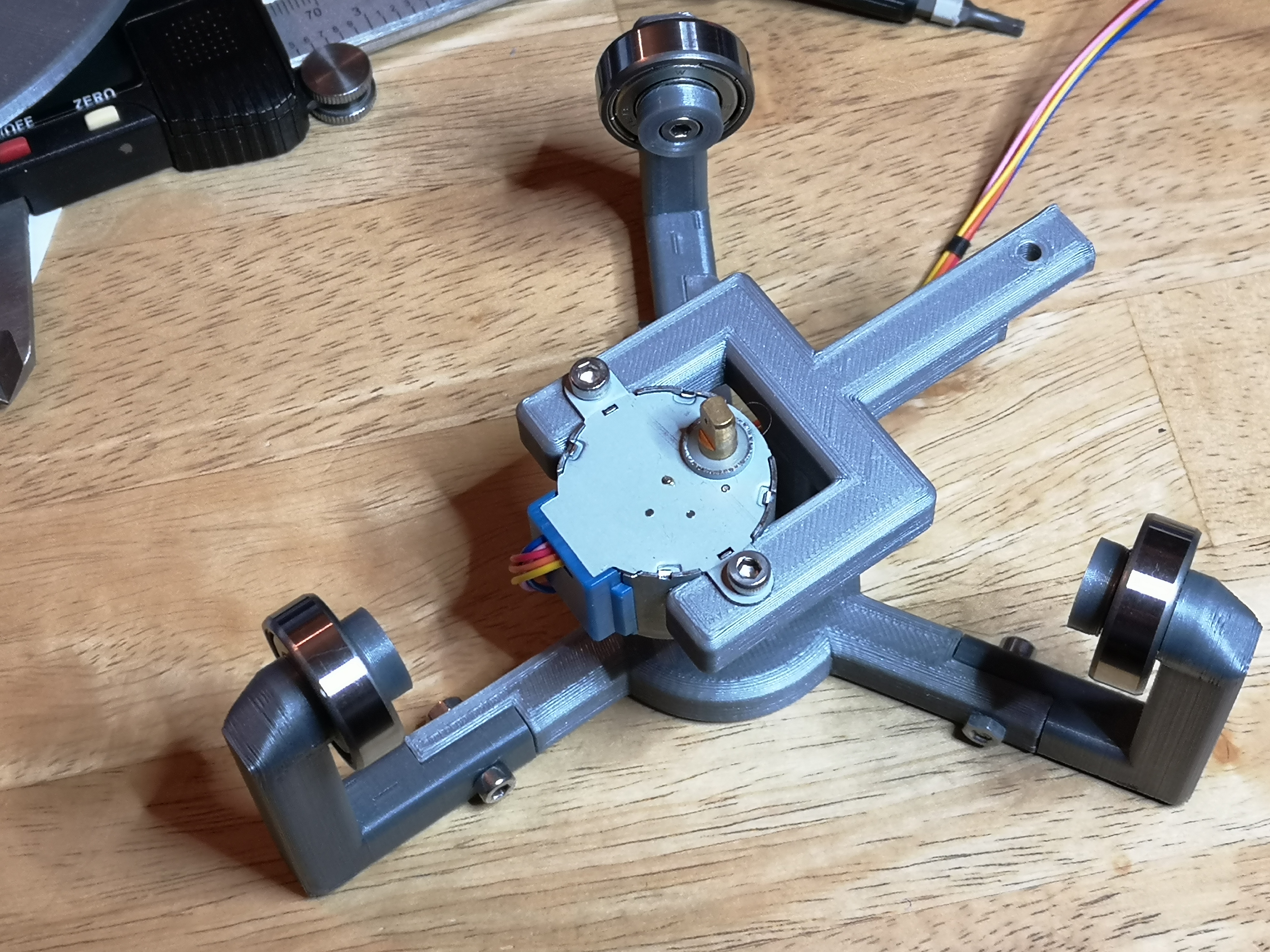
My initial setup was using rather low torque stepper motors, namely the famous 28BYJ-48, simply because I had them available. The film tension is measured and a signal for each stepper motor is calculated in order to keep the film tension within a small window of values. For this to work, I need a rather fine angular resolution of steps, which this geared stepper motor supplies.
Here’s an image of the original design:
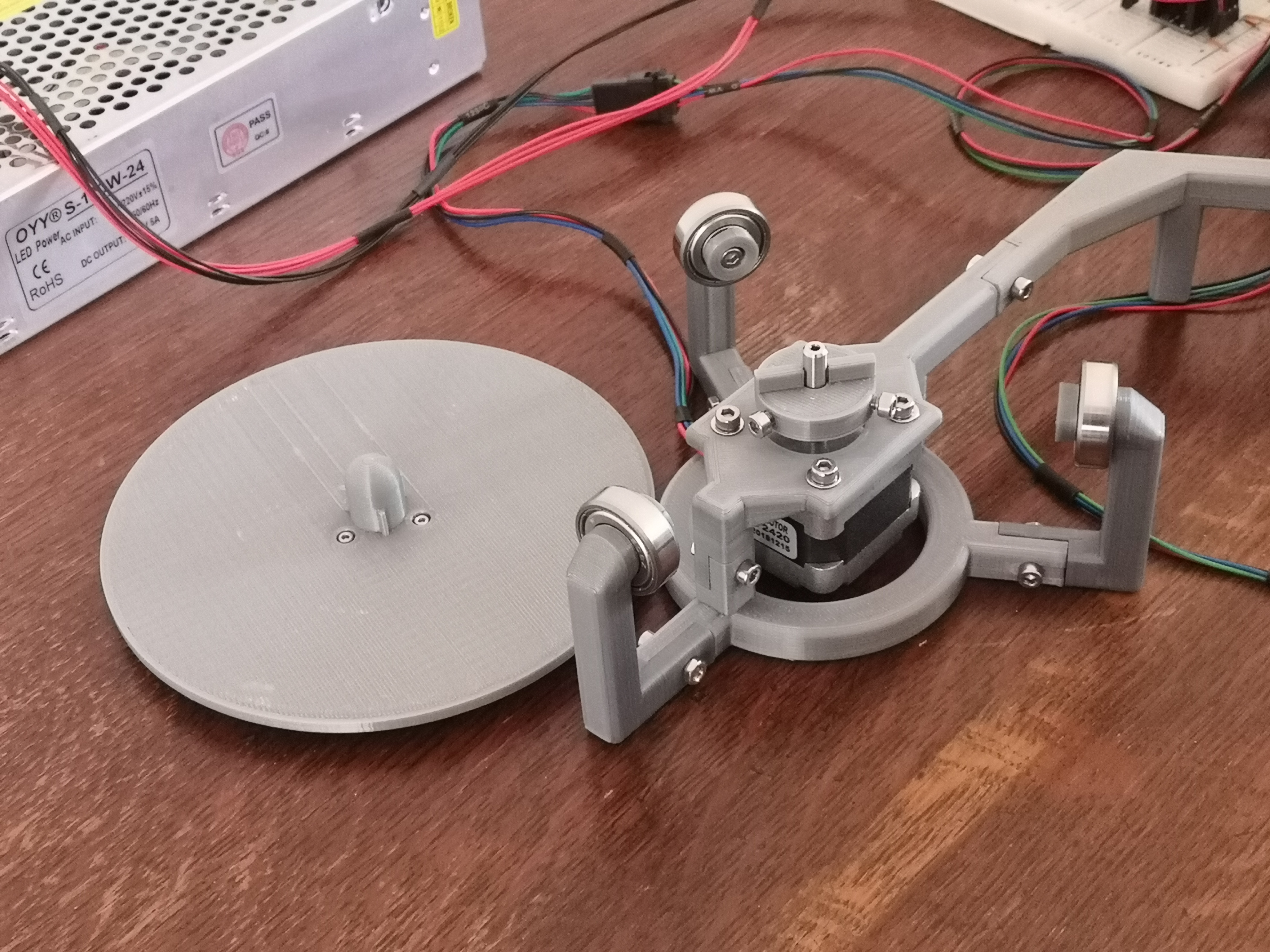
The actual reel is supported by three bearings, the motor just needs to generate enough tension to wind up the reel. Here’s another view to clarify the setup:
These stepper motors are geared and have therefore a very fine angular resolution per step. This is important, as even a small turn of the reel might increase the film tension substantially.
However, for large reels, the motors chosen turned out to be too weak to reliably move the reel. (They are fine for 15m- and slightly larger reels.)
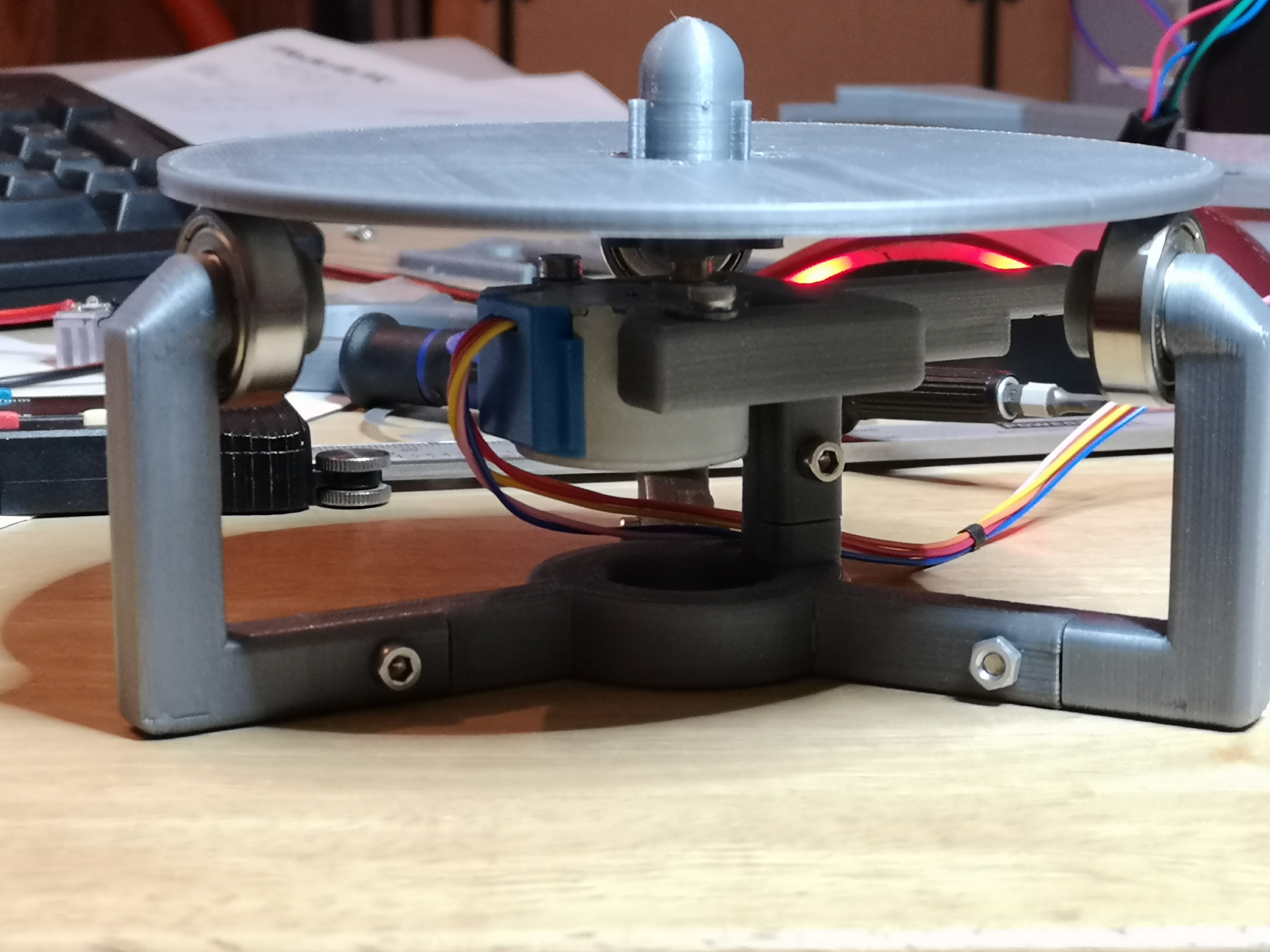
Therefore, I “upgraded” these rather weak stepper motors to stronger, faster Nema-17 motors. I opted for a direct drive, as I reasoned that with micro-stepping I could get a similar good angular resolution than with the geared motor. Here’s the current setup, for comparison:
As it turned out, the micro-stepping did not really work as envisioned.
The amount of torque the motors are excerting on the reel and film, seems to vary noticably depending on how close the micro-stepped position is to the raw stepper position. I am using TMC2208 for driving the steppers, but I must confess that I am not familiar with all the fancy settings of this driver…
The torque variation introduces an oscillatory tendency on my tension-algorithm, most noticable with large reels. It does work, but barely. If there ever will be a next iteration of the design, I will introduce a gear- or belt-based reduction in order to increase the angular resolution of the stepper again by mechanical means.
Of course, I have seen well working designs which simply use an on-off micro-switch for advancing the stepper motors at appropriate times. The variation in film tension from such an approach would however lead in my design to more unwanted frame movement in the film gate, as the film position is not that well defined by the sprocket rollers.