We have done a fair amount of testing.
There are a few ways to go about key point detection. Some algorithms better than others. With Pano software, it does a great job at alignment with frame-lines but will put this into a 3d space and always applies this to several axis(s) vs a 2d space. Its also looking for things like parallax, lens distortion, exposure, ect. Again, because this is a static camera in a 2d space, with a constant of frame lines with a scanner/gate, perfs in each frame, this seems to be an advantage right out of the gate.
Keypoint algorithms really vary from broad to precise. This is based on what it is looking for. Its essentially looking at two frames and looking at the commonalities between the two and assigning number values or coordinates to have a script run once recognized to merge or align those two images together.
In regards to image keypoints without those factors, there are alot of algorithms and formulas designed to look at these things side by side even geared towards industrial level of manufacturing and also things like image stacking and medical applications that compare differences in image sets over a period of time.
Here is an example more on the stacking side in regards to perf alignment within the dimensions of a 4 perf frame.
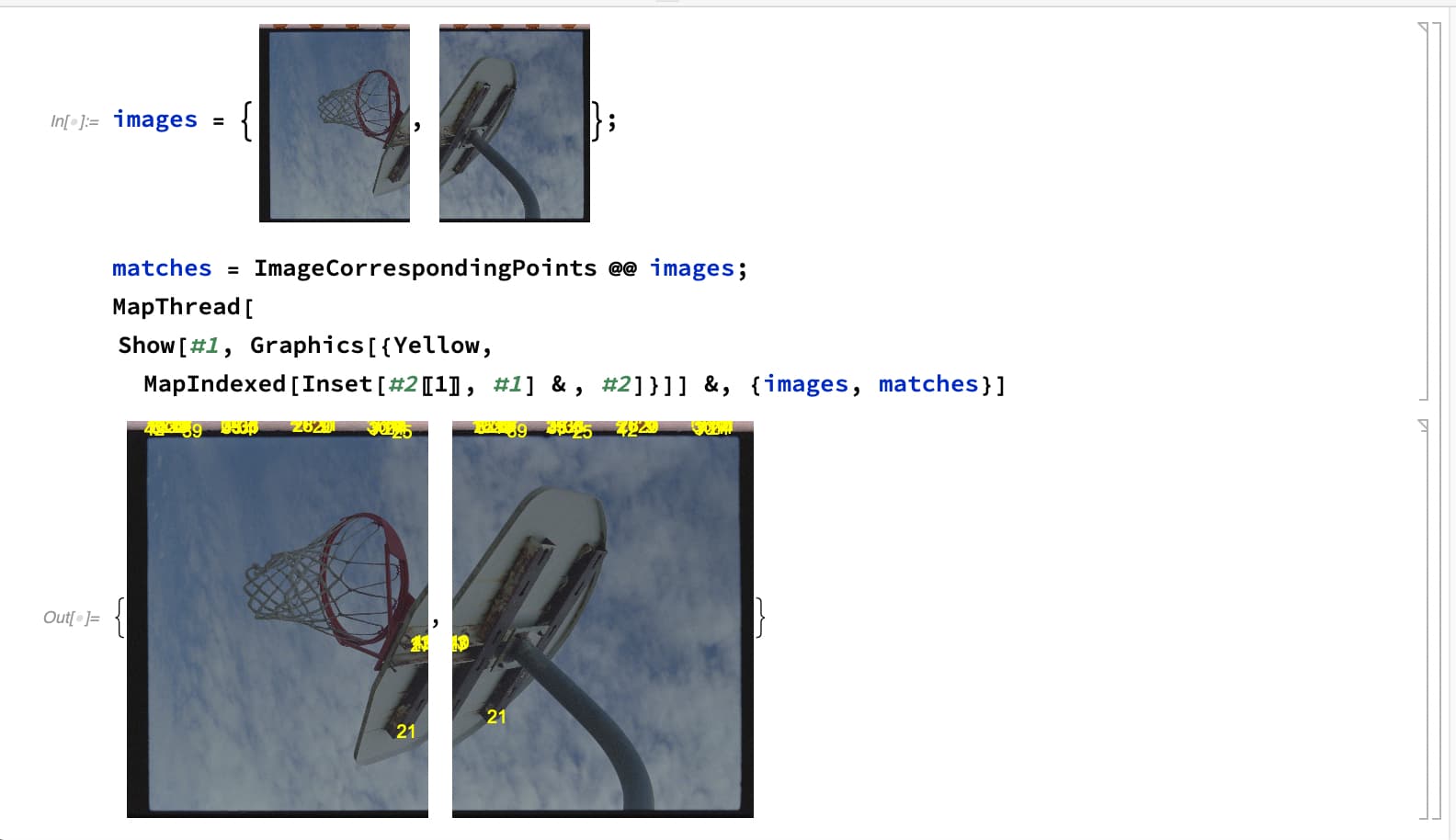
Here is an example of keypoints detection with values assigned though we are looking for something more precise with things like this frame where if there are very similar parts, we need to have something looking a bit more. There are alot like RANSAC, SIFT, Homography, ect.
There really isnt a market for 2d images alinged with a static camera and why there doesnt seem to be a solution with software or GUI and why pano software operates in a 3d space as a camera is moving shot to shot.
Apologies if this isnt totally correct as its just what I have learned but a solution seems to exist with academic open source algorithms to look for key points and create a script or gui that executes image registration. Stitching I think is the incorrect word in this context.
If anyone knows where to pick this up at and run it with. Im the first to admit not a programmer or developer!!