I’m joining this thread a bit late so if the horse is already well out of the barn then …
Assumptions
- Currently, the controller will be a custom designed circuit built on a custom designed printed circuit board.
- The PCB, at least first pass, will use surface mount devices.
- The PCB will be more than two layers (probably).
- The PCB schematic and board layout will be open sourced.
- The overall system/product will most likely be end-user assembled in the first phase of product build.
- This is a very low volume, moderate complexity product. There is a lot of electrical / electronic / mechanical interaction.
- Going forward there may be a manufacturer selling fully assembled units, most likely though all units will be assembled by end-users and/or low-volume manufacturers.
IMHO
I don’t see the rationale for using a custom designed circuit; building the controller from widely available modules and parts would seem a better path.
Custom designed circuitry/PCB are usually motivated by a mix of:
- High volume
- Need for very low cost or good profit margins.
- Unique or complex functionality better implemented in custom hardware.
- Requirement to use sophisticated components that seldom seen in mainstream commodity hardware.
- Personal motivation (Hey! I like to do custom electronics and PCBs)
- Unique requirements to comply with regulations, e.g. RF noise generation or sensitivity.
- There are size and weight constraints.
- There are power (to operate) constraints, e.g. has to run on a coin-cell battery for 6 months.
- Assembly from modules would be too onerous for the typical “builder”.
I don’t think this is a high volume “product”. Cost needs to be reasonable however the bulk of the cost for this product is in the rest of the machine. The size, weight, and power constraints are very minimal. As a system overall this is a complex product; the controller is not. So far there are no exotic functions or components needed in the controller.
Consider additional parameters for the controller:
- Design for manufacture
- Design for repair
- Extensibility
DFM
The machine overall hence the controller will most likely be manufactured (assembled) by an end-user or “maker”, not by a commercial entity. The sophistication of available tooling is limited. If the controller is a single custom circuit board with cable/wiring connectors it is the typical “black box”. This approach would shift the DFM issues from physical assembly to sourcing, i.e. where can this custom board be acquired fully assembled?
Yes, the design/build information will be open-sourced. Will the controller builder be experienced enough to get the controlled build and assembly accomplished. A 4-layer PCB with SMT components will have to, in virtually all cases, be commercially built. Clearly doable, but perhaps beyond the range of typical end-user experience/skill. Yes, a large number of makers get involved in PCB design-build, but no where near a majority.
DFR
For me this is paramount. Use of the machine will probably be front loaded; lots of activity in its first 6-12 months and then sporadic use over the next 6-12 years.
What does an end-user do in 6 years when the parties involved in launch are long gone? A failed motor driver circuit or “flaky” controller board will most likely require controller replacement; controller repair will be beyond then available resources. Who is going to build this controller board?
Details of future failure modes of the controller are hard to predict, one certainty is that with a custom board (4-layer, SMT) the repair for all failure modes will be replacement of the entire controller. Sourcing may not be an issue today, but where will it be in 6 years?
This would seem to motivate controller assembly from a set of widely available, commodity level modules. Is someone going to be making an Arduino Mega or Sparkfun Redboard in 6 years? I think so.
Extensibility
Certainly replacing the entire controller is one form of extensibility., but perhaps not the type of extensibility that supports experimentation.
What if the current design of film tensioning with mechanical limit switches and dancer arms is replaced by a vacuum chamber system? That would be much easier on the film physically, but could the controller support the new types and number of sensors required? Just one example.
Conclusion (finally)
It would seem that using a modular hardware approach would offer a lot of benefits for a device that at launch will be in the minimum viable product (prototype?) stage. An implementation example could be an Arduino MKR1000 with Arduino MKR Motor Shields, or a Raspberry Pi with a variety of real-world sensor and motor control hats.
Well that my $1.00 (way more that $0.02).
Ric
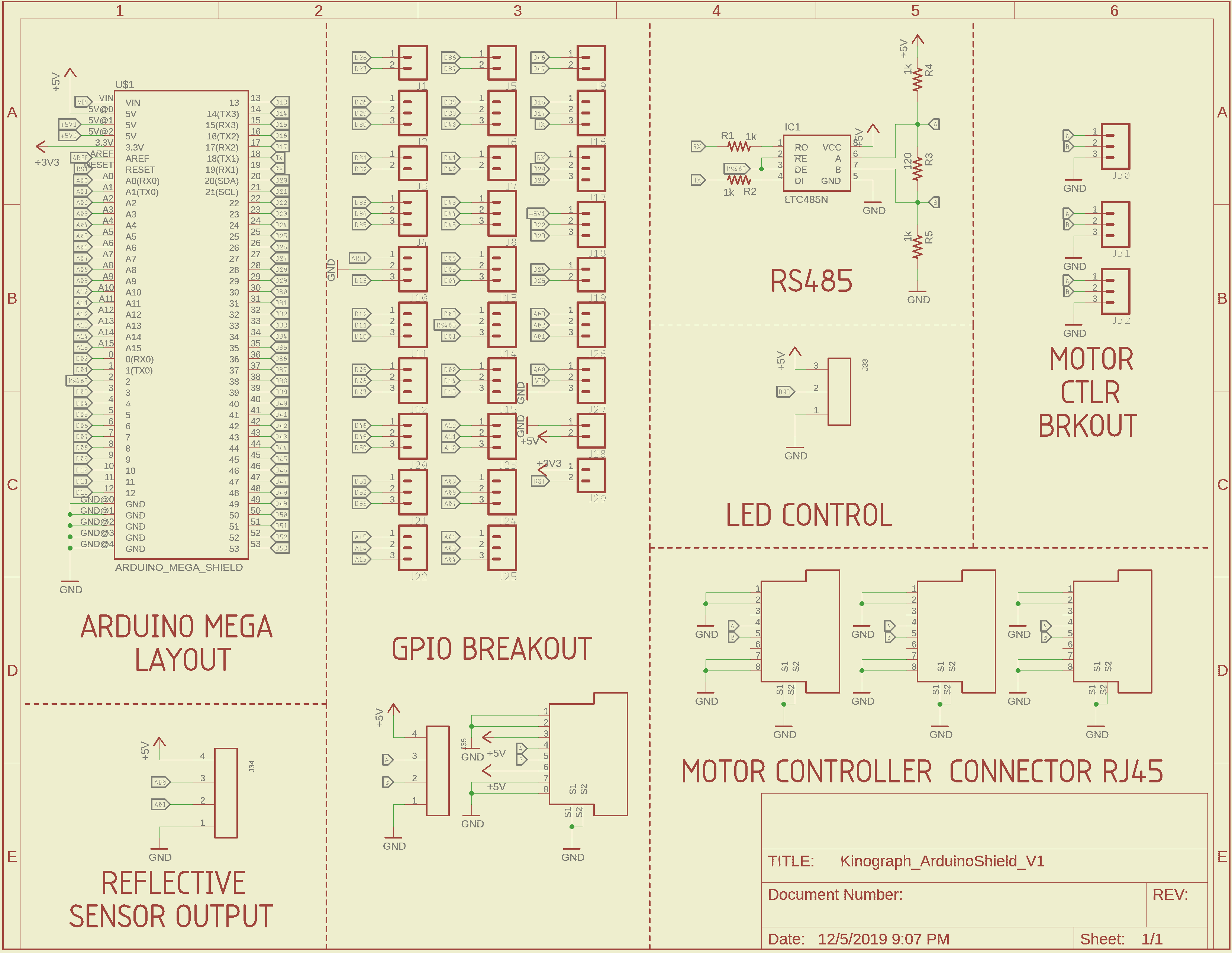
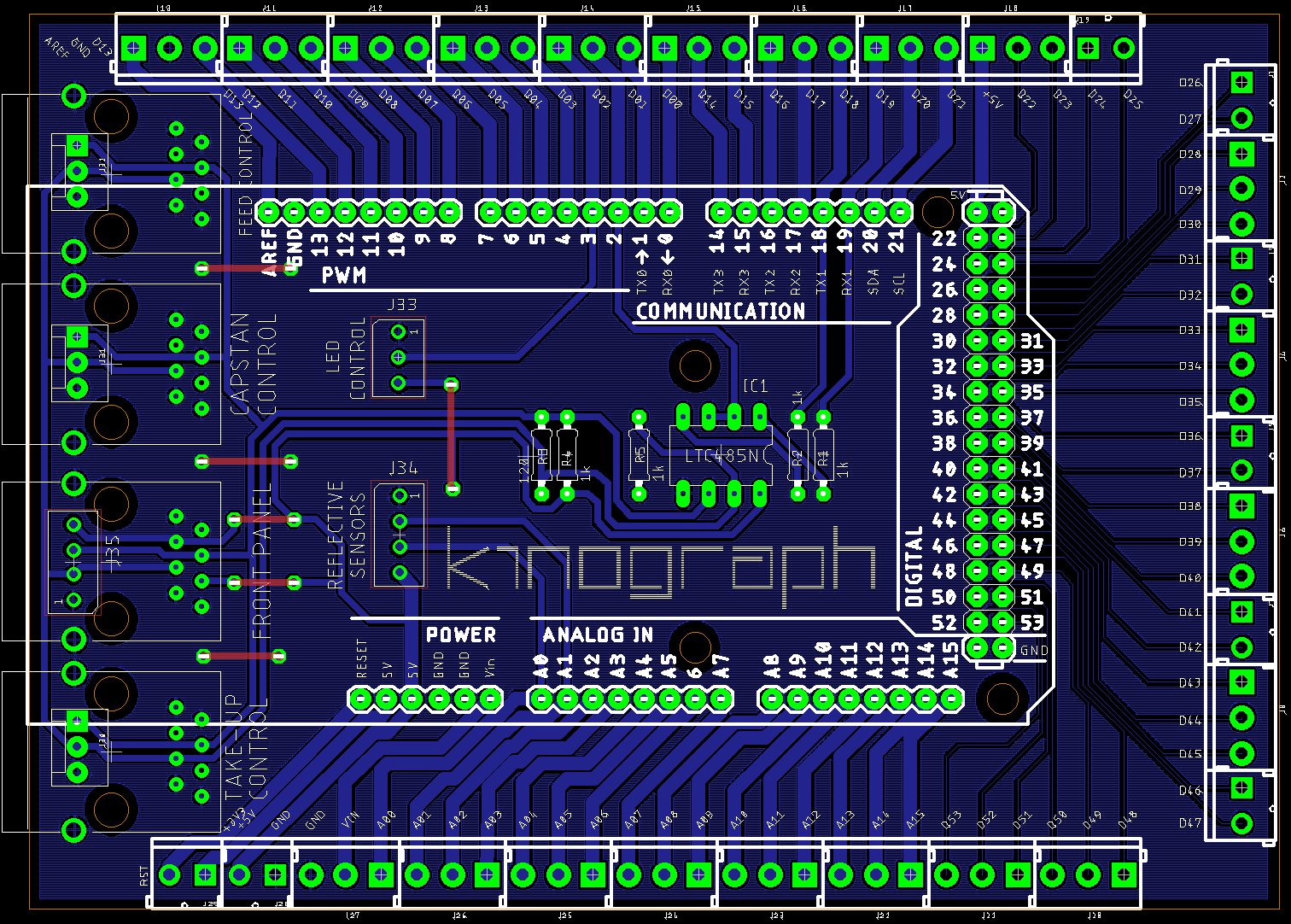

 I hope to order the first prototype boards next week!
I hope to order the first prototype boards next week!

