Hi !
Today, as I was working with my girlfriend on a little musical video for her, I decided to share with you my machine I’ve build during the lockdown last spring. I wanted to share something because I’ve spent hours and hours reading the Kinograph forum, trying to understand what people are saying (I’m a photographer and a musician and knew nothing about electronics, programming and arduino…I’ve even learn to solder this spring…as we say in France, I have two left hands).
So here is my telecine, that my 11years son call “The scanner of the Super 8”.
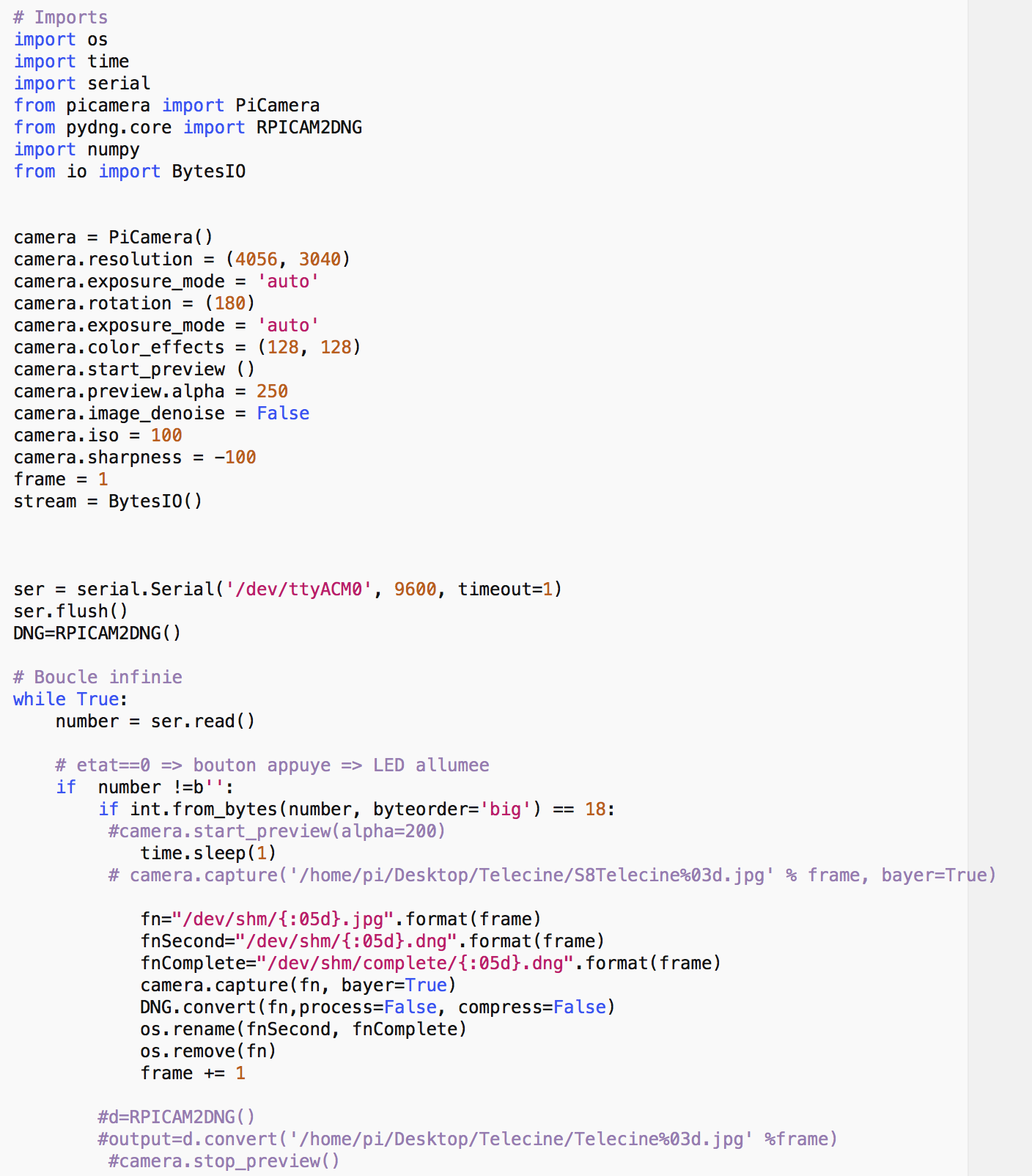
I’m using and Arduino to controle the Nema17 stepper on the take up spool, to analyse the light sensor for the sproket holes and to send the signal to a Raspberry Pi that take the photo. The cam is the Rasp HQ Cam, and I take Raw/DNG files 4056x3040 px.
Then I import in Lightroom, export in Jpegs, and Stabilize with Blender using the sprocket hole tracking.
The sensor is a 2€ light sensor I plug in the analog input of the arduino so I can programme a threshold for negs or inversibles. For the moment it’s perfect with dark side but when it’s transparent, it’s not easy, it depends. I received a reflective IR module last week I have to have a look.
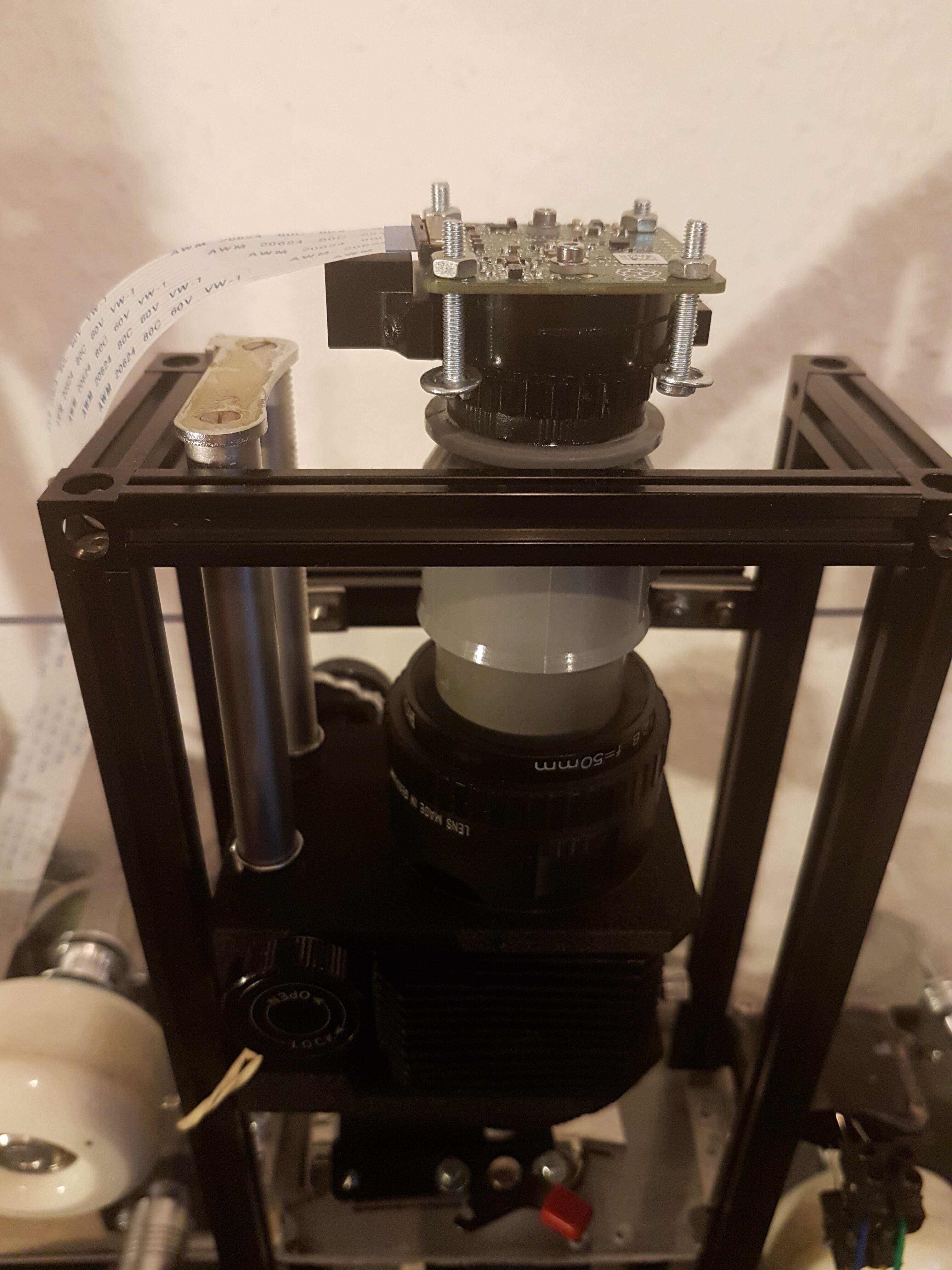
The supply spool is mounted on a really small and cheap 12V DC motor I received with my arduino, that turn in counter sens, the tension is just enough for the film to stay steady but with to little torque to be aggressives.
The led is a 6€ led and the lens a reverse 50mm Rodenstock Rodagon (from my enlarger I don’t use since 3 years). Everything is made with plexiglass, cardboard, scotch tape and a MakerBeam Starter kit.
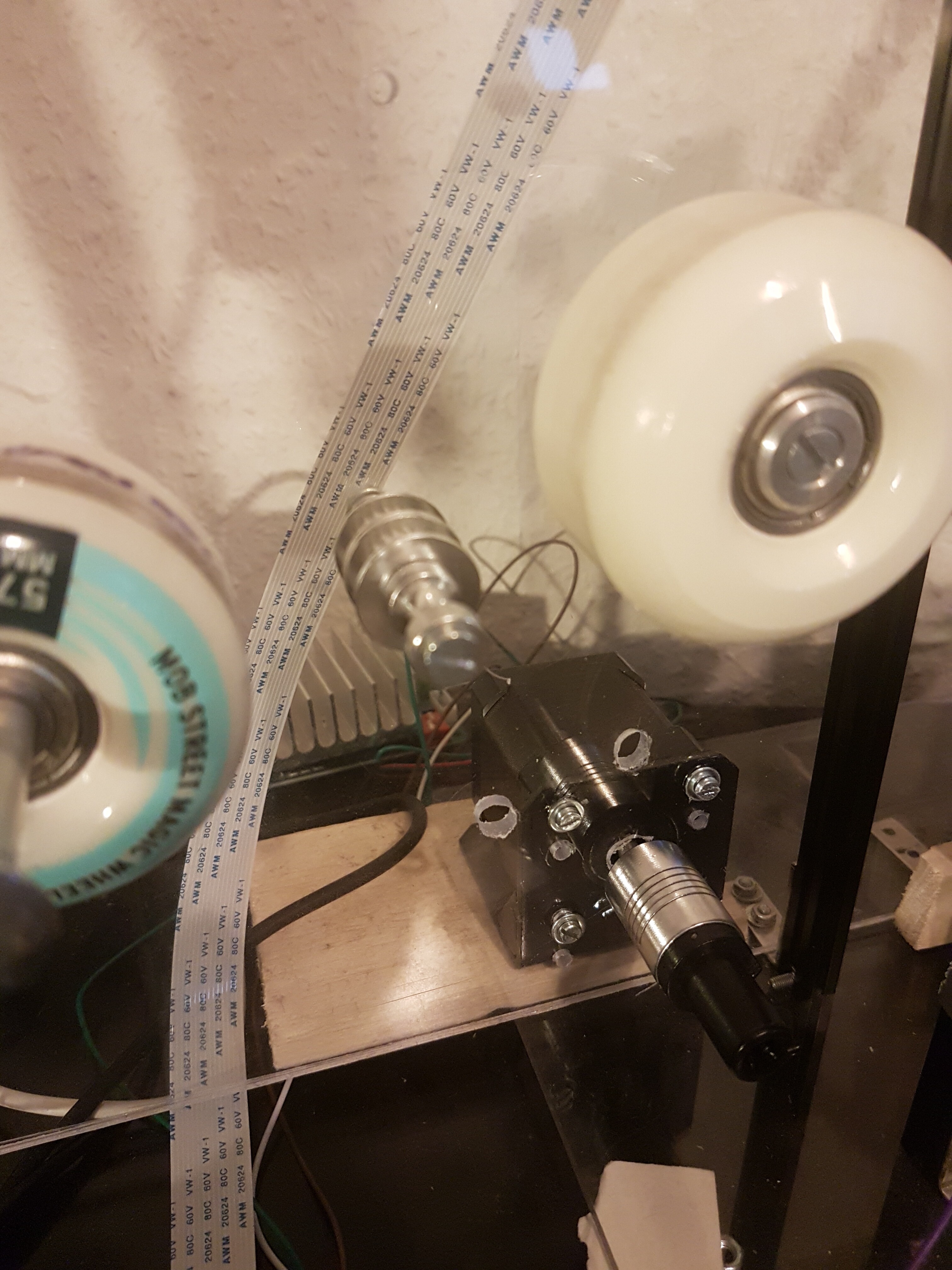
The rolls are Skateboard wheels.
And…well… it’s very slow but it works. 3h for a 15m reel, but as I use it for my own films I shoot and developpe myself, I never have 100 films to scan so it’s ok for me. I use it for film and to take still images for my photographic work… I could go faster I think but.. sometime I’m lazy you know…
So.. Thank you to all the members of this wonderfull forum for helping me in this adventure, it was so passionating that I almost forgott I lost all my job as a musician because of the lockdown ![]()
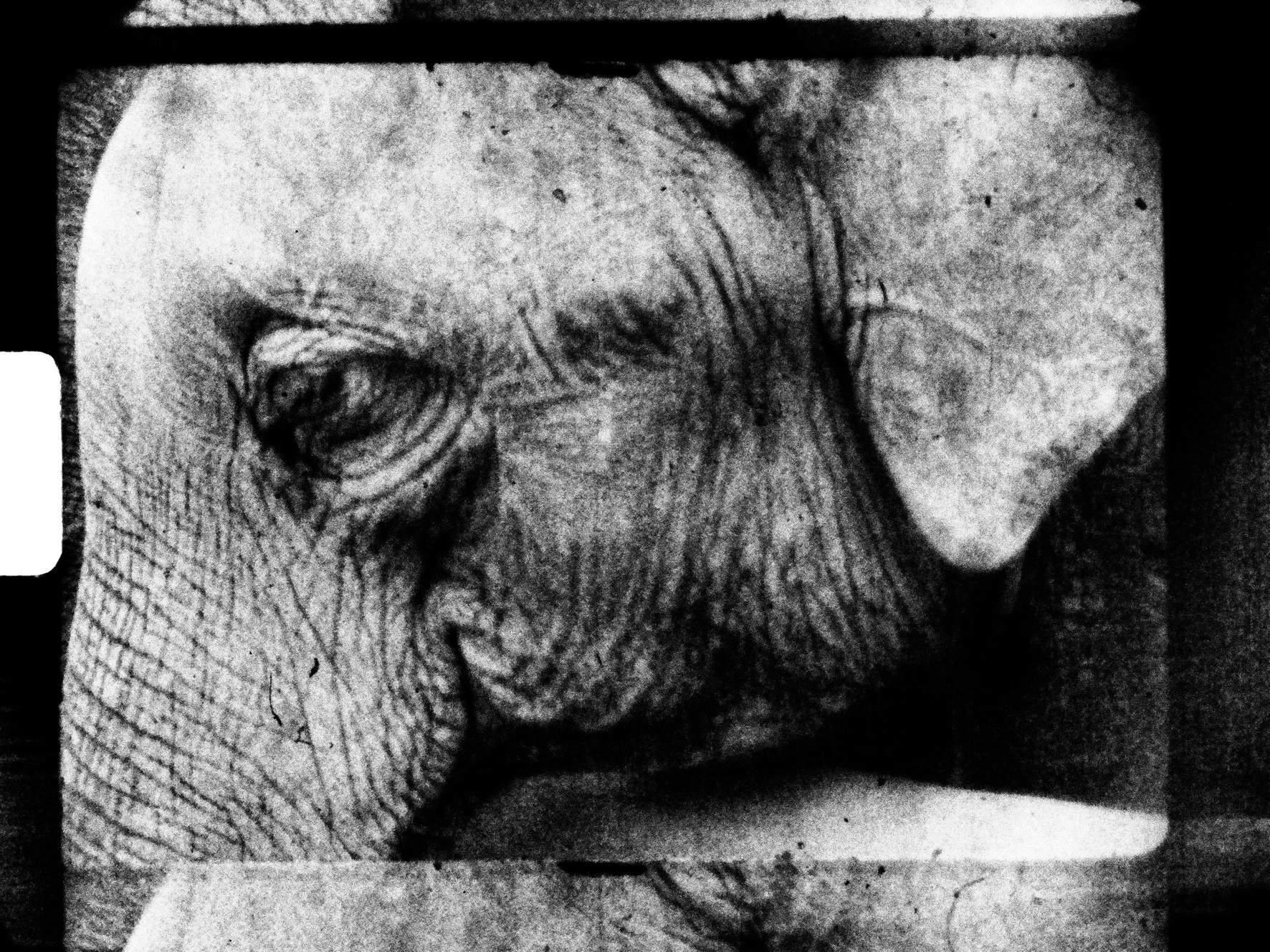
2 extracts of what I’m doing this week with it, 1 roll of Trix developped in my bathroom, shooted in the holy B-Mode from my Nizo cam, for are musical video. The quality is poor on youtube and from my images as those a tests with exports from Lightroom at 540 px (old CPU so I make light tries).
And 1mn of our first tentative to sync S8 and music.. And…it works. (and yes I discovered rotoscoping too ![]() )
)
Sync and shameless rotoscoping
And last image, a still image, a color one from my work in S8 and my chemical incapabilities (that I assume and like):

I wanted to share this as this site as a responsability in the huors I’ve spent learning and trying. I hope my english was understandable !
Cheers from France,
Gregory