Hello everyone, I started building my 16/35 scanner recently and wanted to share my progress with the community.

I just finished hooking up the film transport controls tonight, the drive system is an ODrive controller with 2 brushless motors + encoders, the tension is well controlled at any speed. Controls are hooked through an Arduino who sends ASCII commands to the ODrive. There’s still a bit of refinement to be done with motor tuning but it works well enough now to move on to the next step (Gate design and trigger). It’s a direct drive system, reels on the motor shafts.
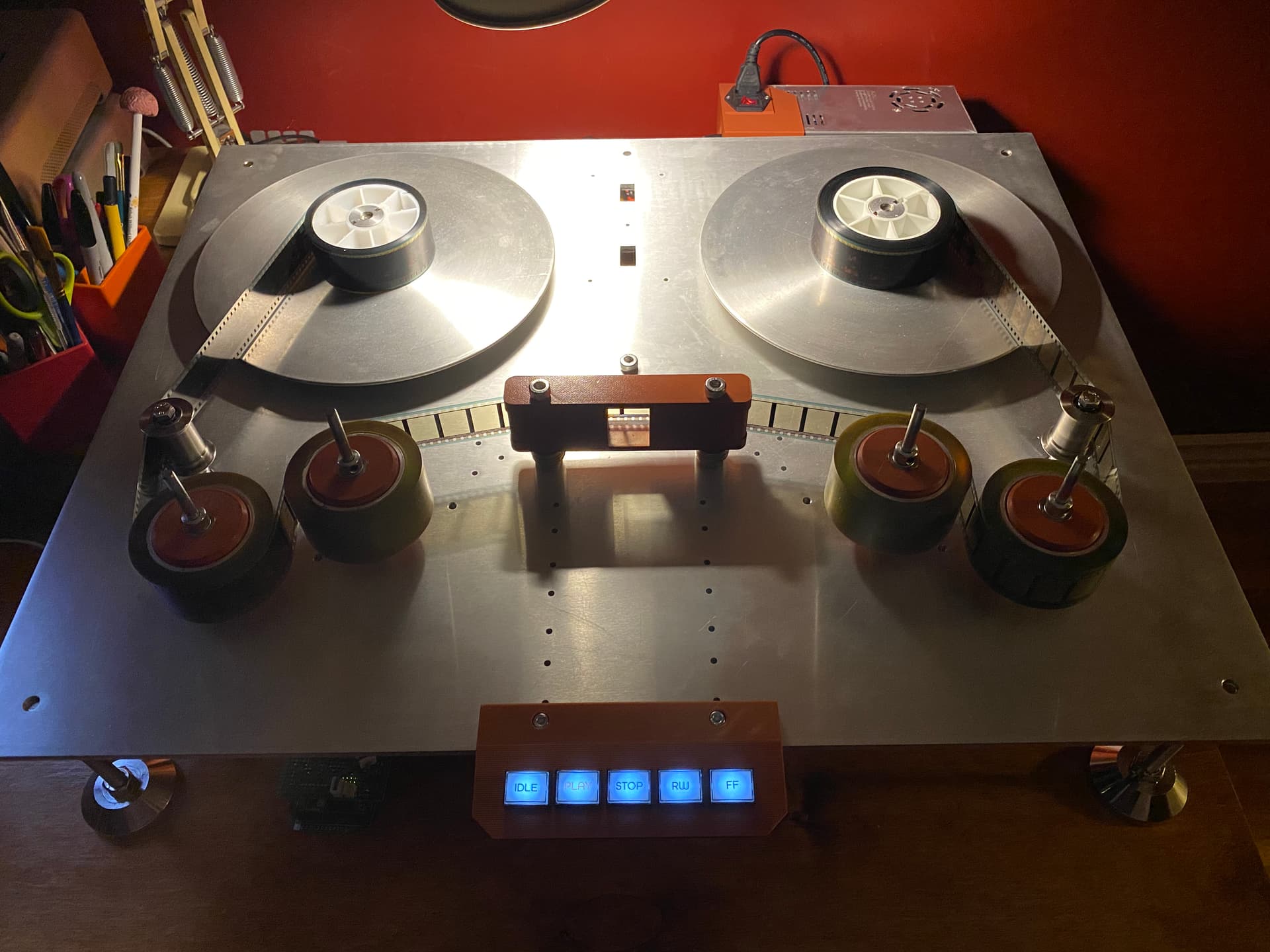
I’m going for a “Turntable” tabletop style with a removable acrylic cover to protect from dust when scanning. For the rollers, I’m using PTRs (inspired by Kinetta) because I like the simplicity, and I added 2 rollers on each side to help guide the film.
The controls are temporarily bolted on the front but in final design they will be embedded on the left side in the top plate.
Here’s the build so far with controls installed.
..and a video moving film. Exciting to be able to use physical buttons, it was tiring entering terminal commands ![]()
Password: robinoscan
https://vimeo.com/619652753
As the design evolves, things will move around a bit so I made extra holes to help prototype.
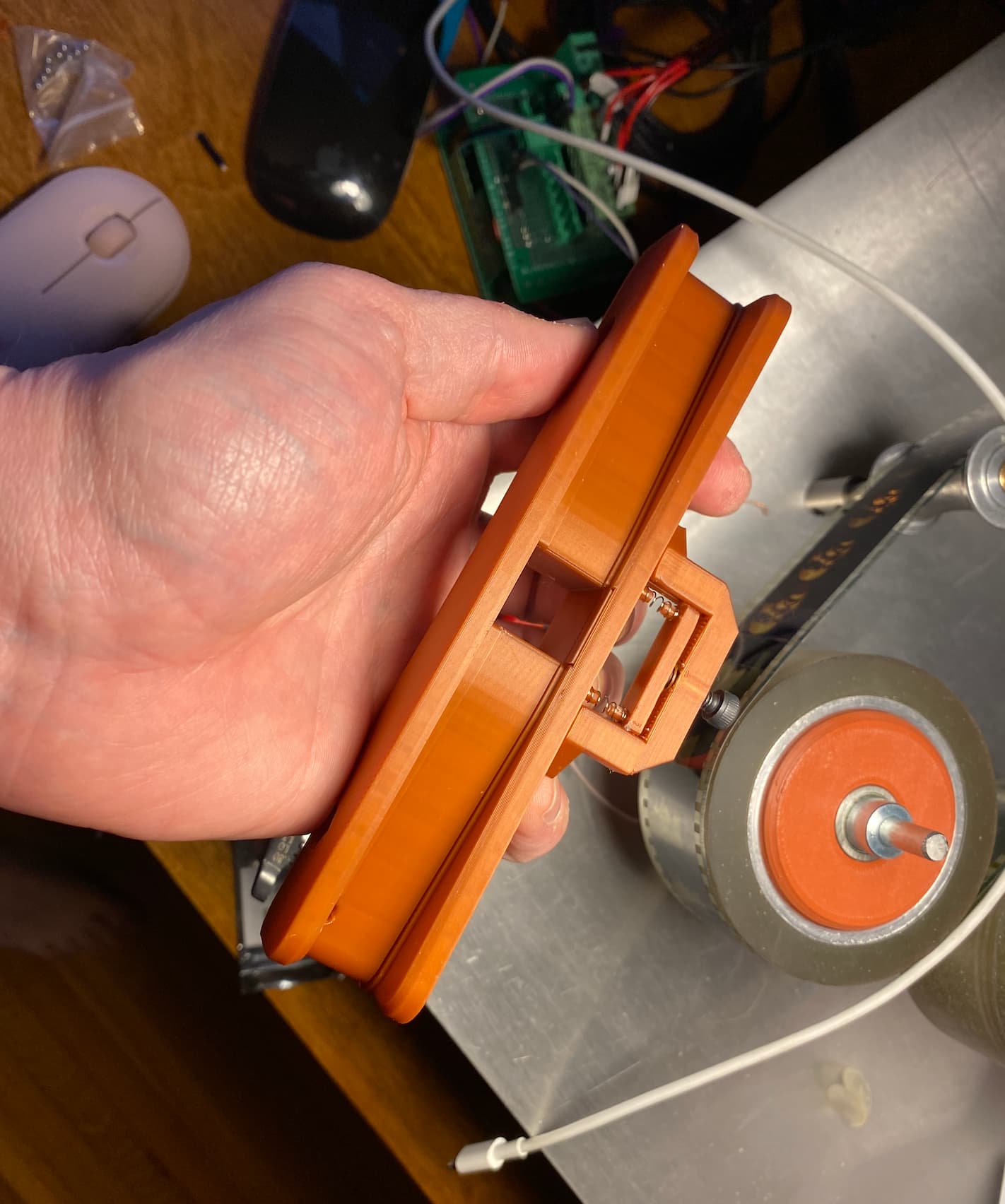
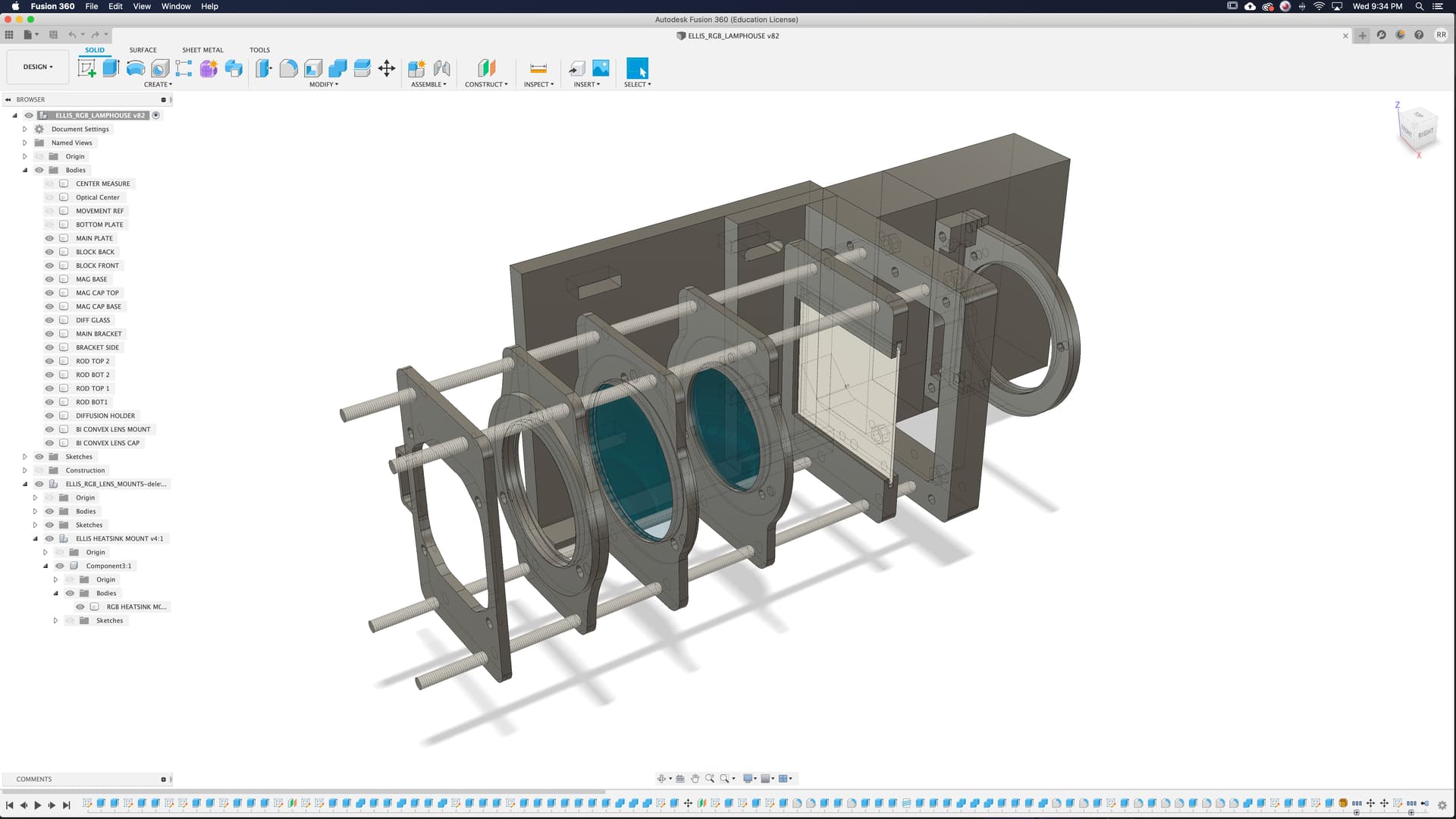
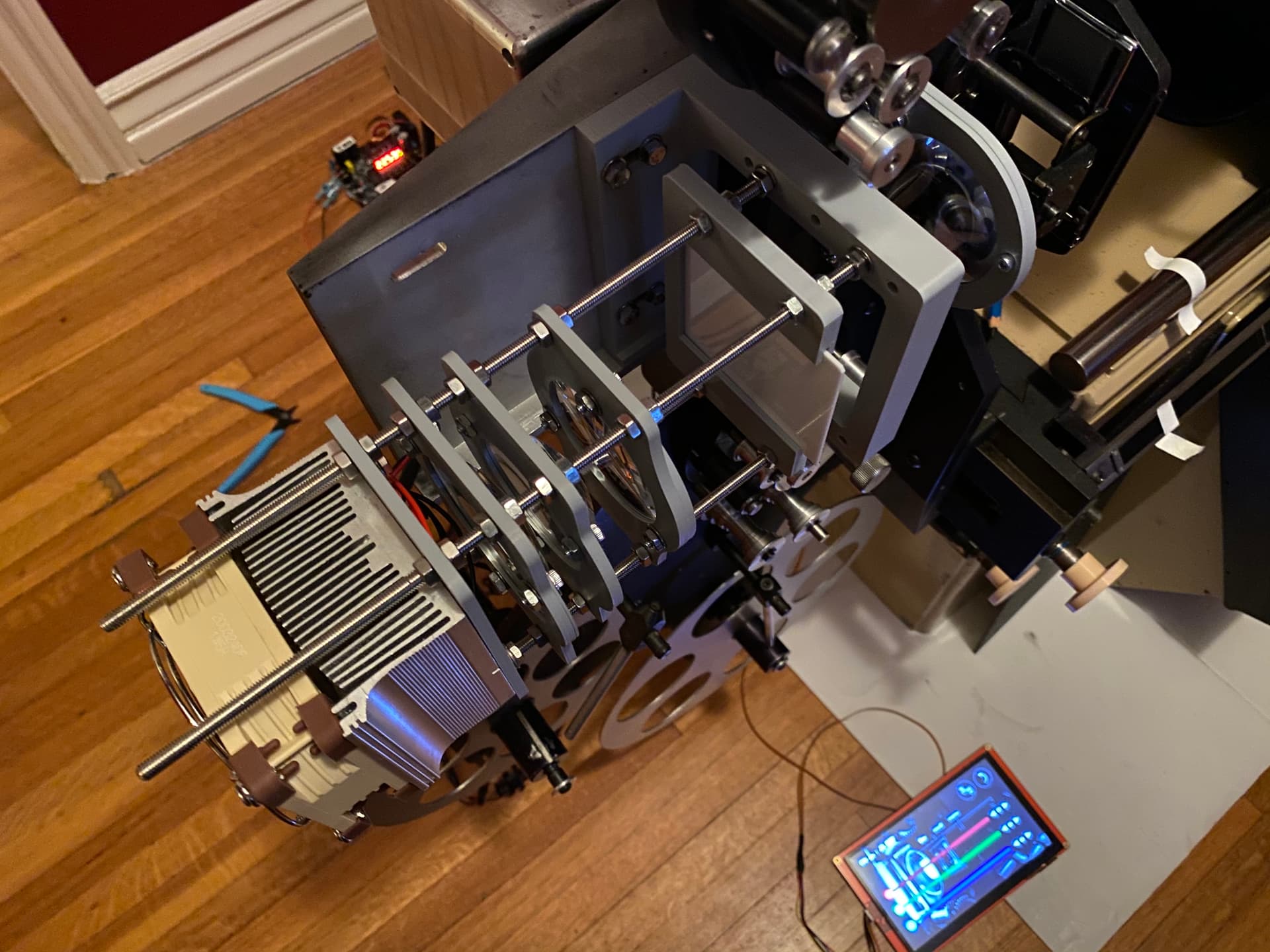
I started working on my integrating sphere. The top part is the heatsink mount for the RGB chip.

..but for now, I will be re-using the same light system I built for my optical printer scanners. There’s great work being done by @matthewepler and other forum members on light systems that are very nice and maybe I could migrate toward that eventually.
This is the light system I made for my optical printer scanners with touch screen RGB controls / 100W RGB chip.



I got the Keyence amp and sensor that @matthewepler recommended, I’ll be installing it this weekend.
For the camera, I’m planning on using the FLIR Oryx 10G / Model: ORX-10G-245S8C, let me know if that’s a good choice it will be my first machine vision system.