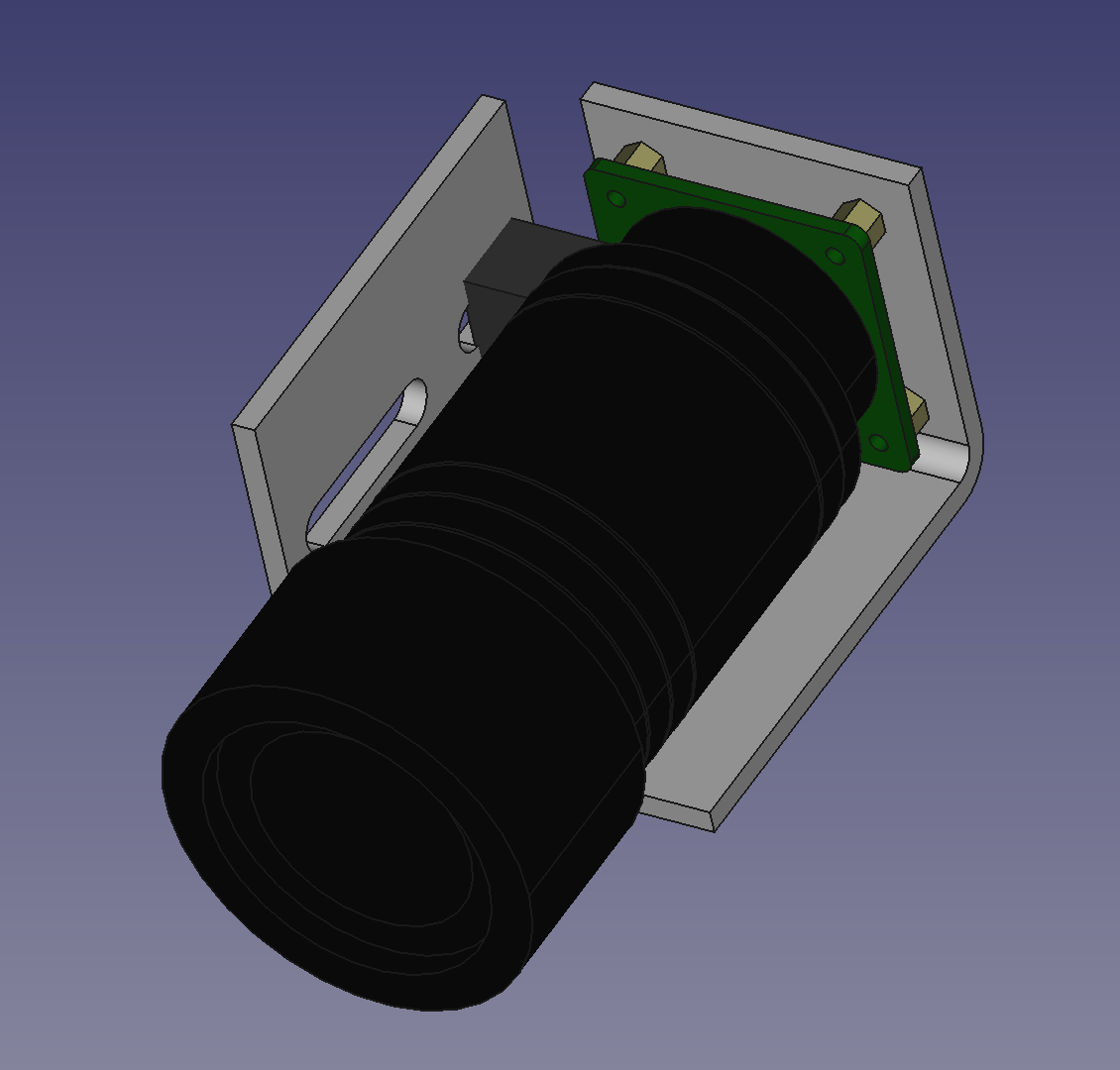
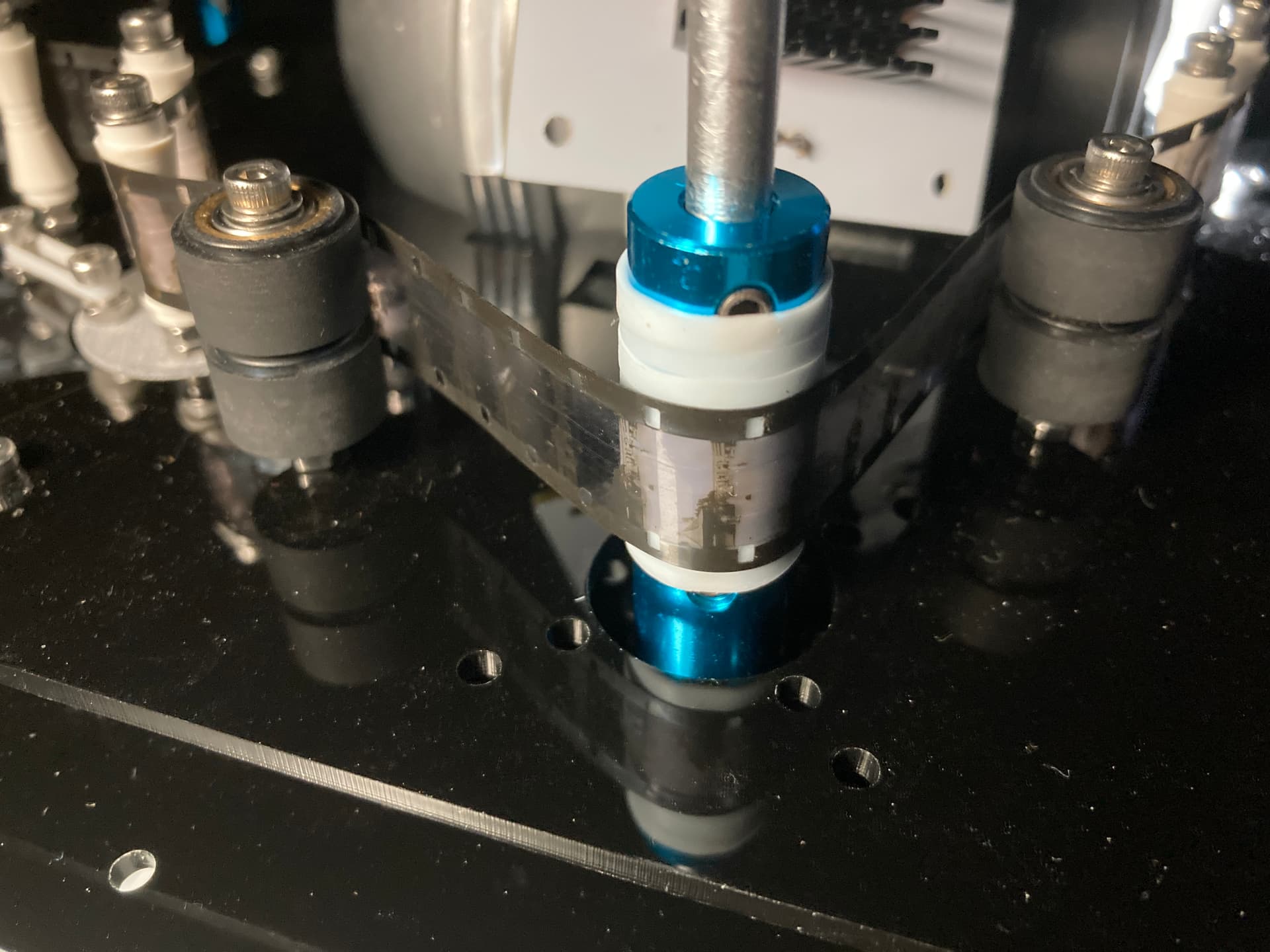
I received the coupler with mounting screws at 180 degree of each other, previous couple had these at 90 degrees.
The following video illustrates a sequence taken with the previous couppler, side-by-side, with sequence taken after replacing the coupler. The new video is shown up-side-down, since the film is now spooled correctly.
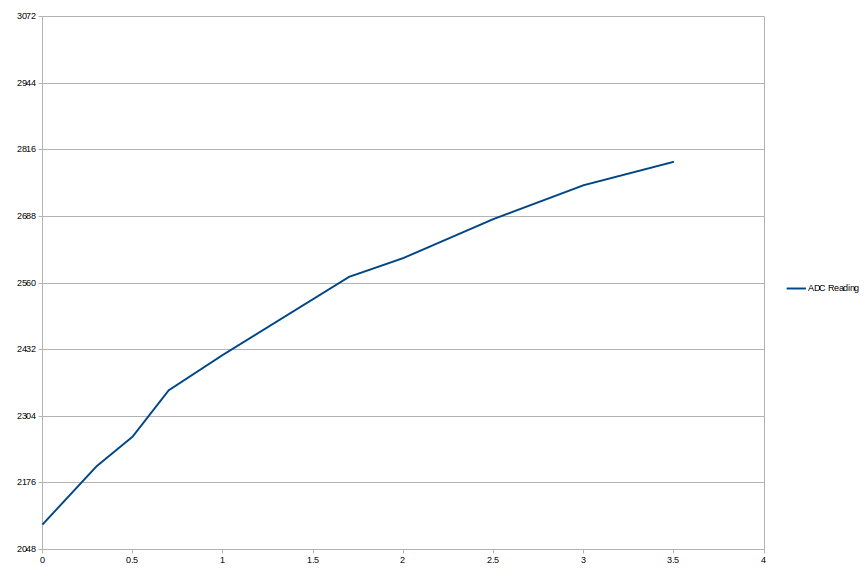
The period of the movement observed in the frame sequences is close to 21 frames, determined by looking at the individual stills side.
For the math, the stepper gear ratio is 13 + (212/289). The TMC2208 driver is used at 1/16 micro step. The stepper is 200 per turn.
Update: For clarity 200 steps = 3200 microSteps.
SMPTE ST109:2003 indicates perforation pitch of either 0.2994 in or 0.3000 in (7.605 mm or 7.620 mm) for 16mm film.
The frame distance that worked best to hold position of the film is 7.54 mm which translates to 2109 microSteps (updated for clarity).
21 frames x 7.54 mm = 158.34 mm
158.34 mm / π = Diameter = 50.40 mm
To confirm, the following the 21 frames periodicity, the following video is showing, side-by-side, frame n on the left, and frame n+22 on the right, on the same frame sequence (repeated 3 times).
Good illustration of how critical are the tolerances in a transport, and how these are mostly masked by the detection of the sprocket (directly or via software).
Great information for designing a software strategy to mitigate the low cost silicone encoder shortcomings.
Thanks again @npiegdon for pointing the cam movement.
Correction, initial posting had the values for 20 frames, corrected to 21 frames.