Having a hard time drinking from the Python Qt5 hydrant to make a decent GUI.
In the meantime, sharing a bit more detail.
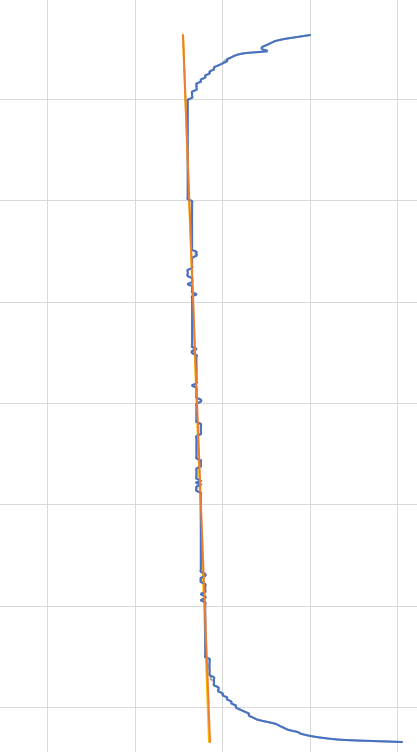
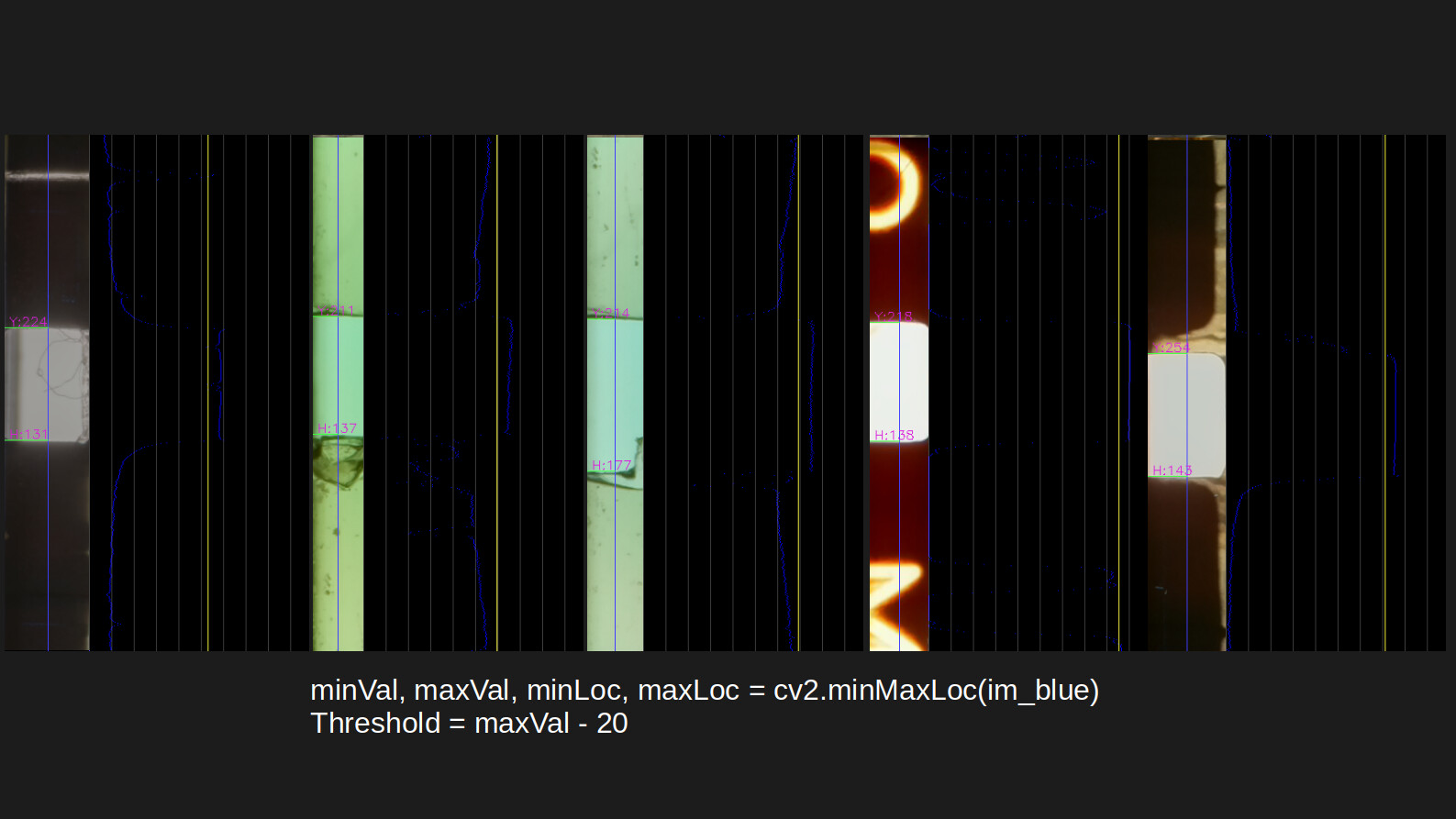
Successive Approximations
This method is widely used for ADCs in the form of a DAC providing a comparison value, against a level that one wishes to measure.
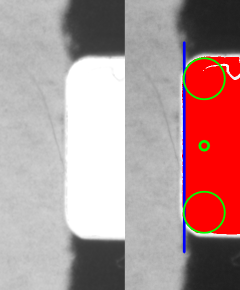
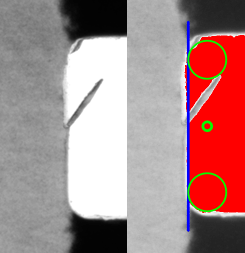
If one takes a slice of the film within the area of the sprocket, the idea is Y becomes the level (analogy would be the DAC), and the pixel content (black or white) becomes the result of the comparison (if the DAC is higher or lower than the level, in this case the edge). For this to work, without additional processing, the requirement is that the edge of the film above/below the sprocket hole is darker than the value of the hole.
#Detection Area
im3 = im0[:1023,:511] # y:yw, x:xw
#Detection Parameters
edge_level = 127 #Threshold
sampling_axis = 255
#Detect Top Edge of Hole
tedge = 0
for yt in range (8,-1, -1):
if (im3[tedge+(2**yt)][sampling_axis][2] < edge_level and
im3[tedge+(2**yt)][sampling_axis][1] < edge_level and
im3[tedge+(2**yt)][sampling_axis][0] < edge_level):
tedge = tedge + 2**yt
#Detect Bottom Edge of Hole
bedge = 0
for yt in range (8,-1, -1):
if (im3[bedge+(2**yt)+tedge][sampling_axis][2] > edge_level and
im3[bedge+(2**yt)+tedge][sampling_axis][1] > edge_level and
im3[bedge+(2**yt)+tedge][sampling_axis][0] > edge_level):
bedge = bedge + 2**yt
bedge = bedge + tedge
sprocket_heigth = bedge-tedge
#Detect Left Side of Hole
xedge = 0
for xt in range (7,-1,-1):
if (im3[tedge+int(sprocket_heigth/2)][xedge+2**xt][2] < edge_level and
im3[tedge+int(sprocket_heigth/2)][xedge+2**xt][1] < edge_level and
im3[tedge+int(sprocket_heigth/2)][xedge+2**xt][0] < edge_level):
xedge = xedge + 2**xt
In the above code, all 3 channels (RGB) would have to be above the edge_level value.
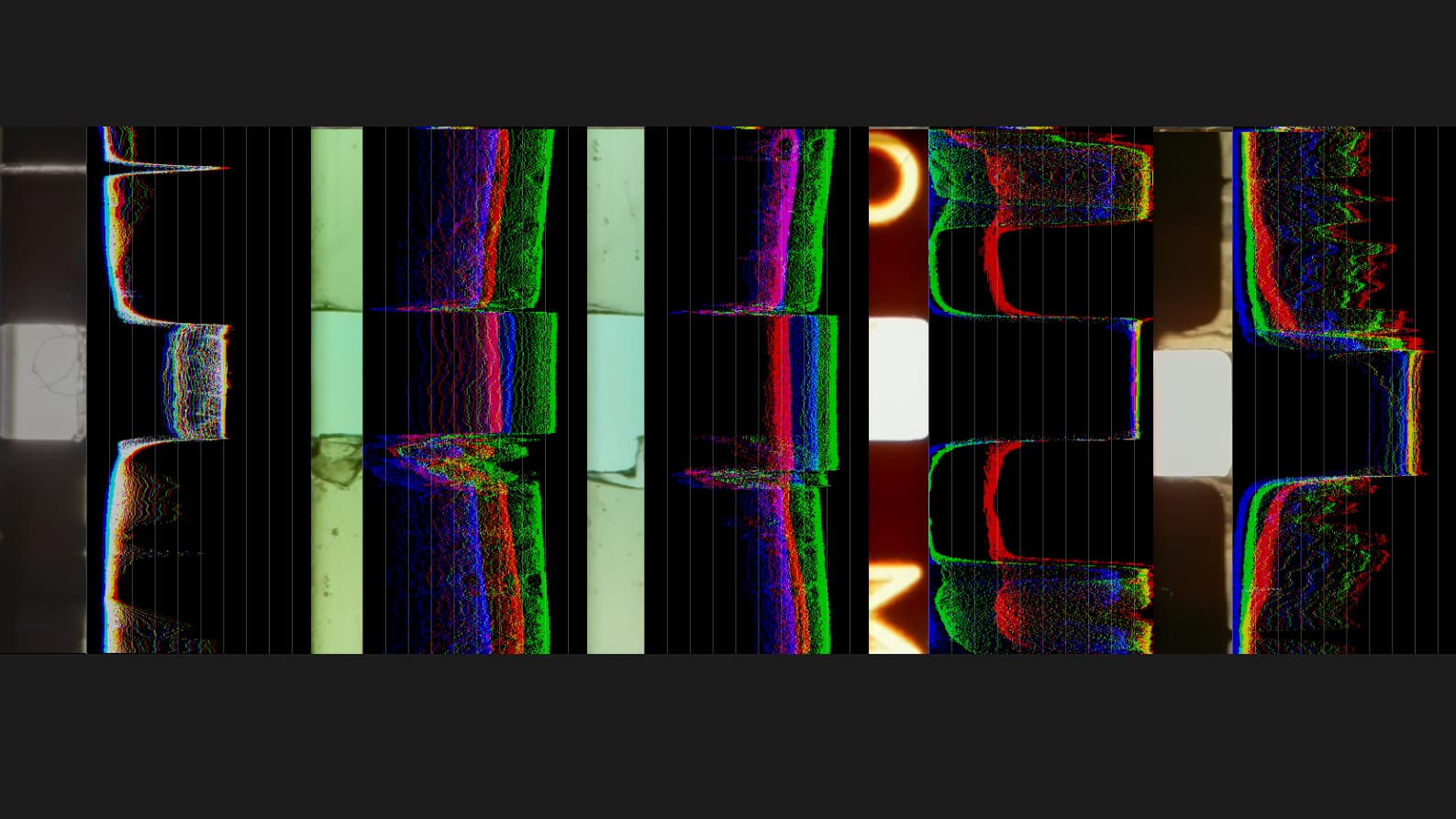
Simple Waveform
For testing, I also coded a simple python/opencv waveform, trying to keep processing reasonable. The code is quite simple.
#capture from Camera
im0=piCam.capture_array()
#create 1/8 size for presentation
im1 = cv2.resize(im0,(0,0),fx=0.125, fy=0.125) #resize to 1/8 (380,504)
# 3040,4056 - 1520,2028 - 760,1014 - 380,507
wvfim = cv2.cvtColor(cv2.resize(im1,(0,0),fx=1, fy=0.025), cv2.COLOR_BGR2GRAY) #resize to 1/8 (380,504)
wvfm = np.zeros((256,504), dtype="uint8")
# markers
for gy in range (0,255,26):
wvfm = cv2.line(wvfm, (0,gy), (503,gy),64,1)
# waveform
for gx in range (0,503,1):
for gy in range (0,9,1):
wvfm[255-wvfim[gy][gx]][gx] = 192
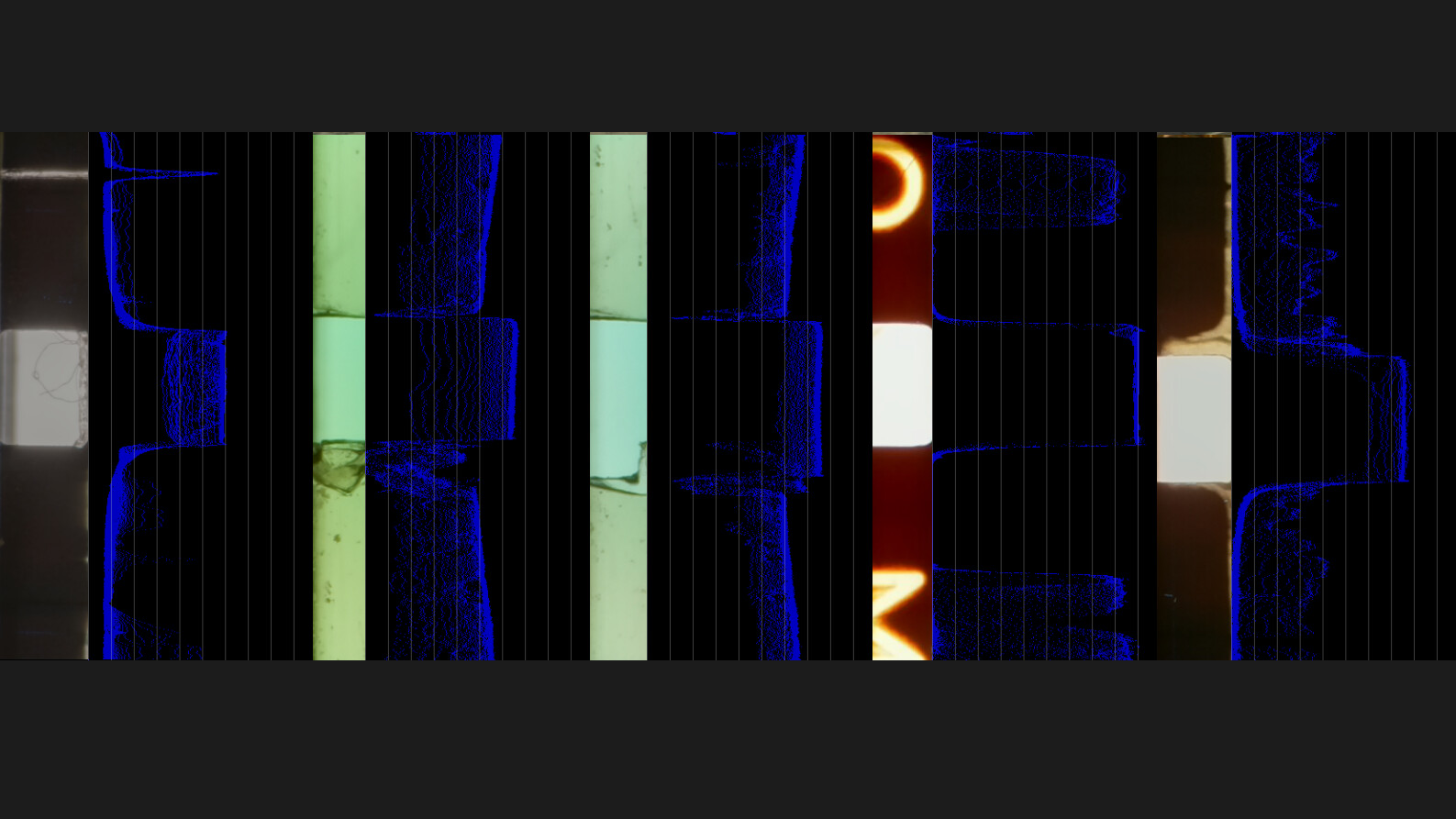
im0 is the full resolution.
im1 is 1/8 of resolution, image captured presented.
wvfim is compressed vertically to minimize the number vertical samples to 10.
Here is how the above looks on a Raspberry Pi4, all presented with opencv windows.
Commands are typed on Putty to the Pico controller, which handles light and transport (steppers and tension).