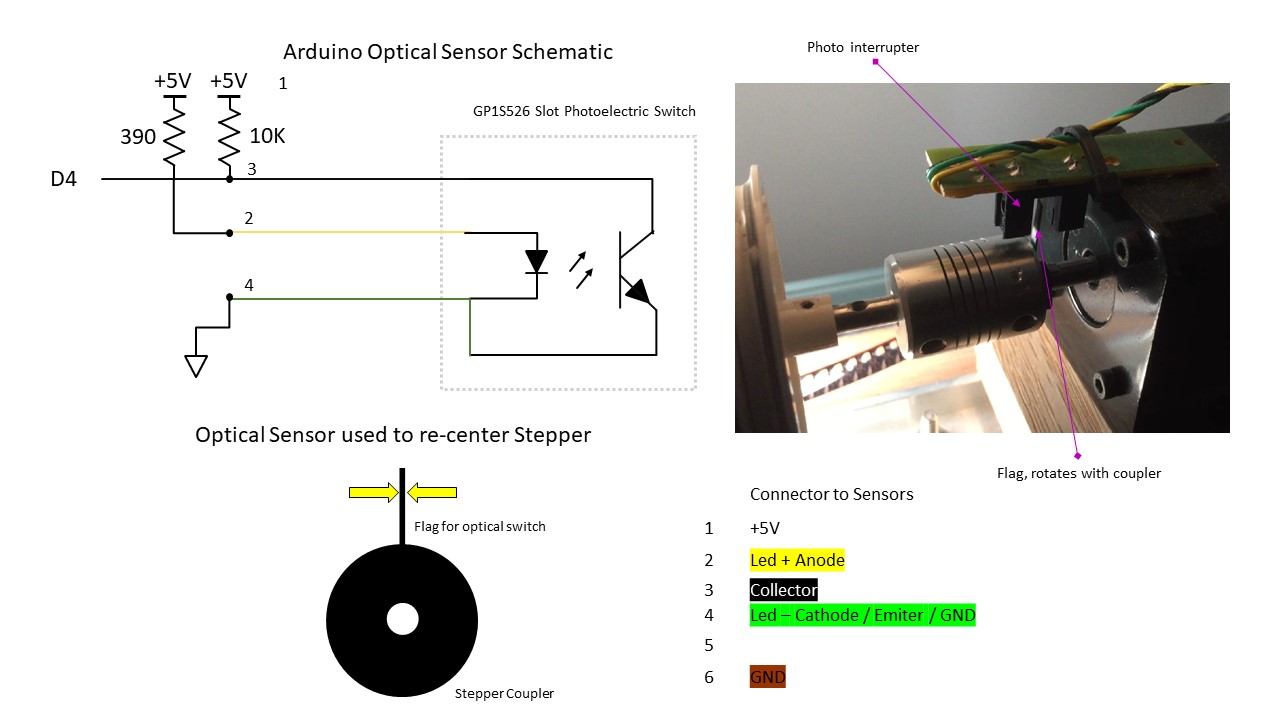
The Raspberry Pi uses 3.3V logic, some Arduino use the same, others use 5V (like the one I used). Where you see +5V instead use +3.3V.
Depending on the actual part number of the sensor, the resistors may vary.
Note that if the mechanism of the projector is completely based on gears, you may not need a position sensor, since the stepper, by design, gives you a precise one turn.
Position sensors are needed to detect that the motor is skipping steps, or when the mechanics of the projector are based on anything that may slip a bit over time.
15m S8 Reel ~ 50 ft S8 Reel
To make the right math, what is the film fps?
In the case of 16 mm, the frame size is also larger. In other words, less frames per m or per ft. Google says it is about 40.
The math from @Manuel_Angel info.
3600 frames ~ 4 hours
3600 frames / 40 frames/ft (for 16mm) ~ 90 ft ~ 4 hours
1800 ft is 20 times that, so the time would be 4 hrs x 20 ~ 80 hours.
But… and it is a big one. It assumes that your setup is capable of doing one frame every 4 seconds. Small variations, multiplied times 1800 ft x 40 frames/ft = 72000 make a big difference.
Sellers are gouging the Pi disguising it as “Starter Kit”. You can find some in Amazon, and if you are in a hurry, that may be an option. A Pi 4GB retail price is $55, a starter kit with video cables, box, power supply, fan, and SD card is about $200.
@DPXTIF I first used the Nikkor EL f2.8 50mm (reversed mounted) for 8mm scanner. It is a good lens. If you are looking for a bit better lens, suggest you consider the Schneider 50mm f/2.8 Componon-S. It has a slight better performance on areas other than the center, when compared to the Nikkor.
If you do decide to go with the Nikkor, make sure you buy the newer version.
I bought both on ebay, patience for the right listing paid off.
Note that in my case, the film size (8mm / S8) was smaller than the sensor (Nikon D3200). The difference may not be as significant for 16mm film and the HQ camera sensor.